









































































![[list:title]](/template/default/images/tbdh.png)
IMU&动态垂直参考单元
量程:±2g、±10g和±300°/s
±60°俯仰和横滚角输出
分辨率:<60μg/-200μg
非线性度:<0.05% 满量程
噪声密度:<100μg/Hz
速度随机游动:0.037m/s/h
振动校正:0.1mg/g2
工作温度: -40~+75℃
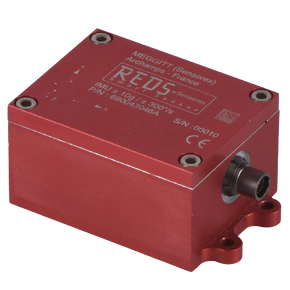
Sensorex® SX43045/46 型惯性测量单元(IMU)与动态垂直参考系统:高性能三维运动测量解决方案
Sensorex® SX43045/46 型是一款集高精度惯性测量与双轴动态倾角测量于一体的先进传感器系统,采用 MEMS 技术与卡尔曼滤波算法,专为动态环境下的运动测量设计,广泛应用于航空航天、工业机械与国防装备等领域。
一、产品特点
(一)多维度运动测量
集成三轴加速度计与三轴陀螺仪,可同时测量 ±2.5g/±10g 加速度(取决于型号)和 ±300°/s 角速率,实时输出横滚(X 轴)和俯仰(Y 轴)角度,测量范围 ±60°,带宽 30Hz。
采用专利卡尔曼滤波算法,有效处理动态环境下的振动、寄生加速度等干扰,静态精度 <±0.25°,动态精度 <±1°。
(二)卓越环境适应性
工作温度 - 55℃ 至 + 85℃,存储温度 - 55℃ 至 + 100℃,IP67 防护等级,可承受 50g 冲击(11ms 半正弦)和随机振动(4.12grms 工作状态)。
抗电磁干扰能力符合 EN 61000 系列标准,适用于复杂电磁环境。
(三)灵活接口设计
数字接口:CAN V2.0B(250kbps)和 RS485(MODBUS RTU,可配置 9.6kbps 至 921.6kbps),支持多节点组网(最多 30 节点),总线长度≤40 米。
模拟接口:0-5V 电压11输出(0.5V=-60°,2.5V=0°,4.5V=+60°),适配传统控制系统。
(四)高精度与稳定性
陀螺仪偏置不稳定性 < 7°/h,加速度计分辨率 < 60μg(±2.5g 型号),角度分辨率 < 0.02°,长期使用线性度误差 < 0.1% FS。
内置自检测试(BIT)9功能,实时监测传感器健康状态,输出开路集电极信号(需上拉电阻 > 15kΩ)。
二、典型应用
(一)工业自动化
工程机械:农业机械、起重机的姿态监测与水平校准,确保作业安全与精度。
动态称重:移动车辆或设备的实时负载动态测量,优化载荷分布。
结构健康监测:桥梁、建筑的振动与倾角监测,预警结构异常。
(二)国防与航空
武器平台定位:射击平台、雷达天线的精准姿态控制,提升打击精度。
船舶稳定系统:监测船舶横摇与纵倾,保障航行安全与设备稳定。
无人机导航:提供三维运动数据,优化飞控系统响应。
(三)智能交通
铁路轨道监测:检测轨道平整度与列车姿态,保障行车安全。
自动驾驶:辅助车辆动态倾角测量,提升复杂路况下的稳定性。
三、技术规格
(一)核心测量性能
参数 | SX43045(±2.5g) | SX43046(±10g) |
加速度范围 | ±2.5g | ±10g |
陀螺仪范围 | ±300°/s | ±300°/s |
角度测量范围 | ±60°(横滚 / 俯仰) | ±60°(横滚 / 俯仰) |
静态精度 | <±0.25° | <±0.25° |
动态精度 | <±1° | <±1° |
带宽 | 30Hz(角度输出) | 30Hz(角度输出) |
(二)电气特性
电源:4.8-34VDC,功耗 < 1.5W(典型 25mA@24V)。
输出接口:
CAN 总线:29 位扩展帧,250kbps,需 120Ω 终端电阻。
RS485:MOD12BUS RTU,默认 19.2kbps,8N1 格式
模拟输出:0-5V15(角度),阻抗 < 200Ω。
(三)物理与环境
尺寸:86x51x38mm,重量 < 220g,阳极氧化铝外壳。
防护等级:IP1367,盐雾测试 96 小时。
振动:随机振动144.12grms(工作),冲击 50g/11ms(半正弦)。
四、接口与安装
(一)机械安装
3xM4 螺丝固定(扭矩≤2Nm),底面 2xφ2.5mm 定位孔用于精密对齐,安装平面需平整刚性。
工作条件:Z 轴必须朝上3,横滚 / 俯仰角度在 [-60°, +60°] 范围内。
(二)电气连接
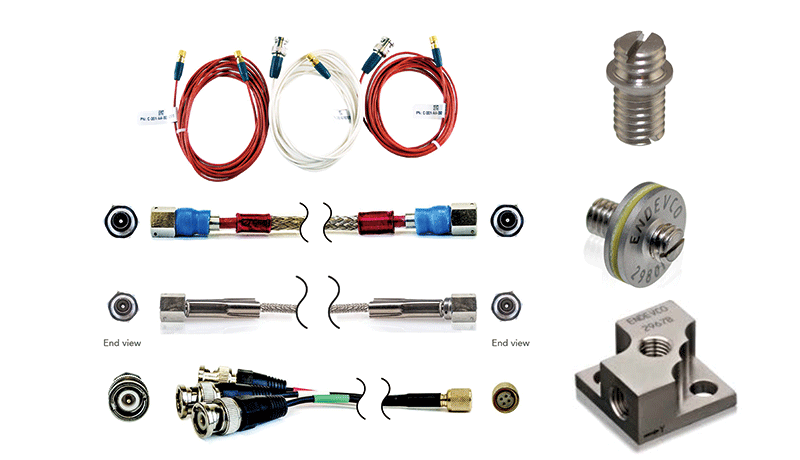
Fischer 防水连接器:
电源:4 脚(+)、3 脚(GND)
CAN 总线:5 脚(CAN_L)、6 脚(CAN_H)
RS485:1 脚(B)、7 脚(A)
模拟输出:8 脚(俯仰)、10 脚(横滚)、9 脚(公共地)。
线缆配置:可选5Meggitt 成品线缆(90507539 直头 2 米 / 90507568 弯头 1 米),需按色标接线。
五、选型与订购
型号 | 加速度范围 | 参考代码(电流输出) |
SX43045 | ±2.5g | 690 043 045 |
SX43046 | ±10g | 690 043 046 |
六、注意事项
电源限制:输入电压需在 4.8-34VDC 范围内,避免反接。
安装方向:Z2轴必须垂直向上,否则角度输出无效。
总线配置:C4AN/RS485 总线需终端电阻,长距离时建议添加低通滤波器。
七、获取支持
访问中国区授权代理商冠标公司官网www.gp-tm.com或致电深圳总部电话 0755-83283120,获取技术咨询、产品报价及定制服务、 DLL 驱动或接口协议文档。
![[list:title]](/template/default/images/fdj.png)
















